- 彼得兔经典故事集(附优美英文故事朗读光盘 套装共4册) 比阿特丽克斯·波特
- 识字启蒙游戏书 3-6岁 幼儿识字早教魔术贴识字卡片手撕拉粘贴益智玩具书(全10册) [3-6岁] 张燕
- 新税法下企业纳税筹划与风险防控 李海鹏
- 2021新版 中级经济师教材 金融专业知识和实务(中级)中国人事出版社 全国经济专业技术资格考试辅导用书编委会
- 富爸爸商学院 [美] 罗伯特·清崎
- 在你身边为你设计Ⅲ 腾讯公司用户研究与体验设计部
- 时尚cosmopolitan(2021年2月号)(本期封面杨幂) 李晓娟
- 开始做播客 克里斯滕·迈因策尔
- 网络攻防技术与实战:深入理解信息安全防护体系 郭帆
- 【礼盒装】公文写作金句速查一本通 : 诗词、佳句、俗语、点睛文案用法+实用电子工具包(含15套公务员笔试真题、50个写作常用管理学原理、74篇党员必读经典、121个精选PPT模板等实用资料!) 岳海翔
- Python高性能(第2版) 加布丽埃勒·拉纳诺
- 中国共产党第十九届中央委员会第四次全体会议公报(2019年) 编写组
- 鹅公坪(聂雄前追忆自己童年、少年时代的乡村生活) 聂雄前
- 一笔一旅:绘四季的水彩小物 战战
- 宋代文人书画评鉴 傅申
- Scratch少儿编程一点通(全彩印+视频教学版) 蹇彤
- 熊猫指南:行走的味蕾 毛峰
- 李中莹亲子关系全面技巧(白金版) 李中莹
- 人工智能全球格局 国务院发展研究中心国际技术经济研究所
- 牛顿传 迈克尔·怀特
- 日本精选专注力培养大书 全2辑——儿童思维专注力训练,提升观察力、认知力等(套装共6册 赠荧光灯笔) [3-8岁] 香川元太郎
- 重生后,我洗白了 徐柳行
- 老鼠什么都知道 海带
- 3-6岁儿童领导力培养游戏书(全6册):口才幽默 时间管理 社会交往 情绪管理 自我认知 思维整理 [3-6岁] 米诺鼠童书馆
- 逆袭:职场人的高效成长法则 凌云
- 纸上美术馆 莫里索:亲密时刻 弗朗索瓦丝·培尔
- 我的策展之道 汉斯·乌尔里希·奥布里斯特
- 硅谷超级家长课:教出硅谷三女杰的TRICK教养法 埃丝特·沃西基
- 同花顺炒股软件实战从入门到精通 龙马金融研究中心
- 紫微星语 《紫微星语》编委会
- 山鸣谷应 石守谦
- 空气质量模型:从入门到实践 伯鑫
- 神经漫游者三部曲:神经漫游者+零伯爵+重启蒙娜丽莎 威廉·吉布森
- 精益经营与目标管理实战 新益为
- 网络攻防实战研究:漏洞利用与提权 祝烈煌
- 全球公共债务:经验、危机与应对 巴里·艾兴格林
- Harry Potter and the Prisoner of Azkaban J.K. 罗琳
- 2020高考英语真题 《高考英语真题》编写组
- 营养的科学(DK百科) 里安农·兰伯特
- 内亚渊源 罗新
- 理想树 2019版 高考必刷题 数学1 集合 常用逻辑用语 函数与导数 必修1、选修相关部分 杨文彬
- Unity人工智能实战(原书第2版) 豪尔赫·帕拉西奥斯
- 从此岸到彼岸:人民币汇率如何实现清洁浮动 缪延亮
- 泡泡英语精讲精练:青少版1A 乐学东方青少新概念英语班1A 新东方教育科技集团有限公司
- 罗辑思维2 罗振宇
- 歌剧史 卡罗琳·阿巴特
- 腹腔镜下结肠癌手术策略和实践 [The Strategies and Tactics of Laparoscopic Colorectal Carcinoma Surgery] 松村直树
- 见证历史 哈尔·比尔
- 斗罗大陆5重生唐三3 唐家三少
- 让工作化繁为简:用Python实现办公自动化 李杰臣

人工智能前沿丛书-类脑智能机器人
| 书籍作者:乔红 | ISBN:9787543984967 |
| 书籍语言:简体中文 | 连载状态:全集 |
| 电子书格式:pdf,txt,epub,mobi,azw3 | 下载次数:8857 |
| 创建日期:2023-04-01 | 发布日期:2023-04-01 |
| 运行环境:PC/Windows/Linux/Mac/IOS/iPhone/iPad/Kindle/Android/安卓/平板 | |
内容简介
习近平总书记曾在“两院院士”大会上指出,机器人是“制造业皇冠顶端的明珠”,它已成为全球的热点话题。从机器人学诞生以来,人们梦想着机器人越来越接近人,成为人的助手和“朋友”,但传统的机器人学理论使得机器人的灵巧性、智能性和与人的“共情性”还不能达到人们的期望。
类脑智能机器人采用脑科学领域的研究成果,它力图将人的神经科学的内部机理融入机器人,提高机器人的感知、决策、运动控制和学习能力。它和以功能和性能为导向将认知、决策和控制模型应用于机器人相比,具有较大的不同。后者主要基于对机器人的功能的要求开展研究,根据所需的功能,从外表和观察对系统实现进行猜测,这种方法把人的认知能力、学习能力和动作控制能力看做是一种|“黑箱”模型;而类脑智能机器人以探索人的内部机理为导向,从宏观、介观再到微观,层层深入,理解人体内部的具体机制,这种方法希望使人的认知能力、学习能力和动作控制能力逐渐“白化”,从“黑箱”模型逐渐成为“灰箱”模型。
类脑智能机器人通过长期逐步白化黑箱模型的内部机理,从内部逐渐提高性能,有可能在各种不同场景下获得更好的泛化能力。如图所示,类脑智能机器人力图将人的内部机理融入机器人系统,从而将“黑箱”模型逐渐“白化”。同时,我们可以将已经实现“白化”的机理模型,形成一定的应用,从而提高机器人的认知、学习和动作控制能力。类脑智能机器人由于融入了对机理的探索,有希望实现与人共情,与人产生更深度的交互与合作,也有希望对于国防、工业、服务业等领域提供更多的帮助。
作者简介
乔 红,北京科技大学机械工程学院院长,博士生导师;英国Manchester大学,Lecture(永久教职,博导);中国科学院自动化研究所、中国科学院“百人计划”研究员; 中国科学院大学计算机与控制学院“控制理论与控制工程”教研室主任。社会兼职:九三学社中央科技委员会委员;全球IEEE RAS(机器人与自动化学会)管理委员会委员(为中国籍大陆学者首次当选);国际一流SCI期刊《装配自动化》主编。
2004年通过中国科学院“百人计划”引进回国,2007年获国家杰出青年基金,2014年获国家自然科学二等奖(第一完成人),2009年获“新世纪百千万人才工程”国家*人选,2012年获“享受国务院特殊津贴专家”。团队长期从事机器人的“手-眼-脑”研究,包括:工业机器人操作与控制(手)、机器人视觉(眼)、生物启发式与类脑智能机器人(脑)等。团队成立以来,在国际期刊与学术会议发表论文200余篇,其中SCI期刊论文120余篇。
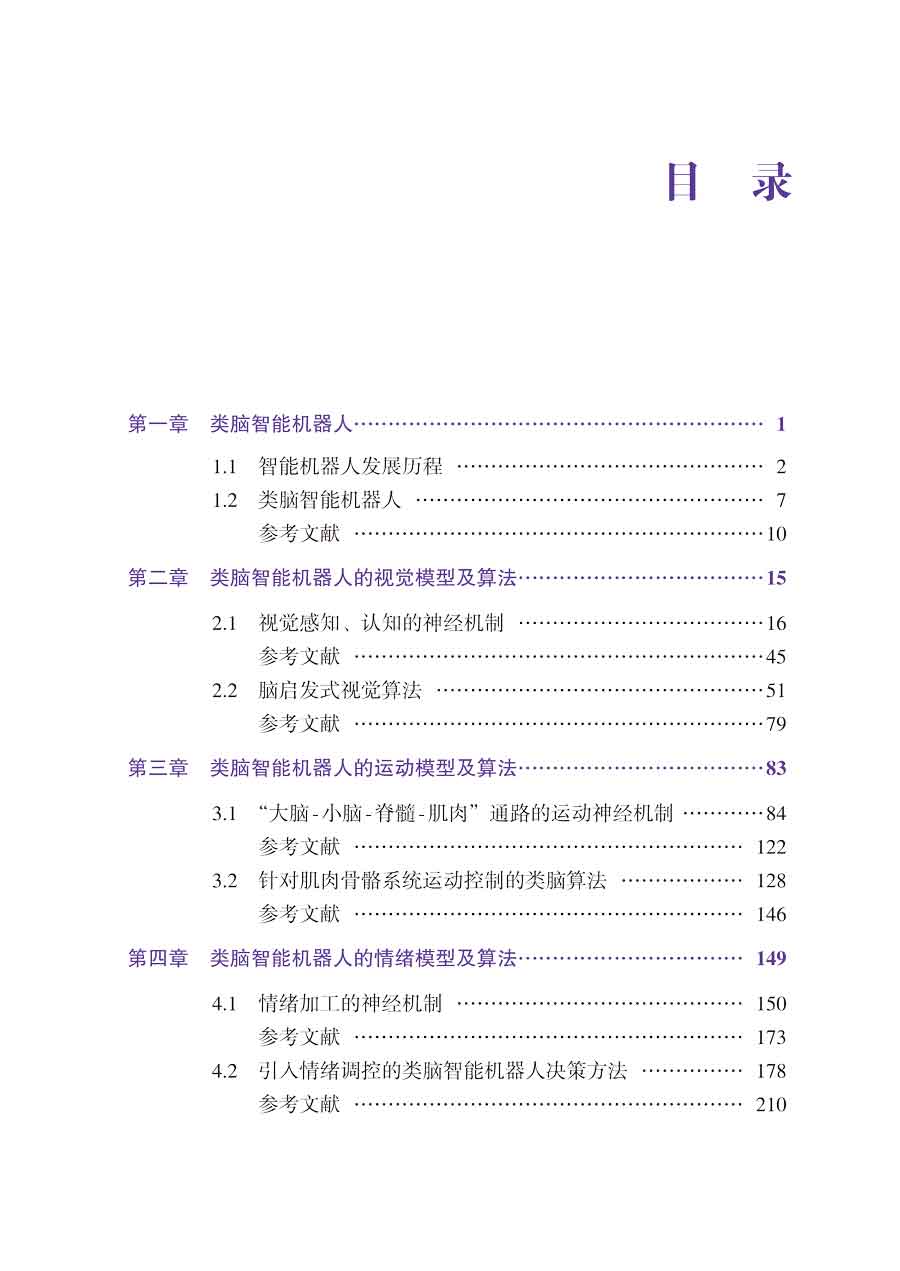
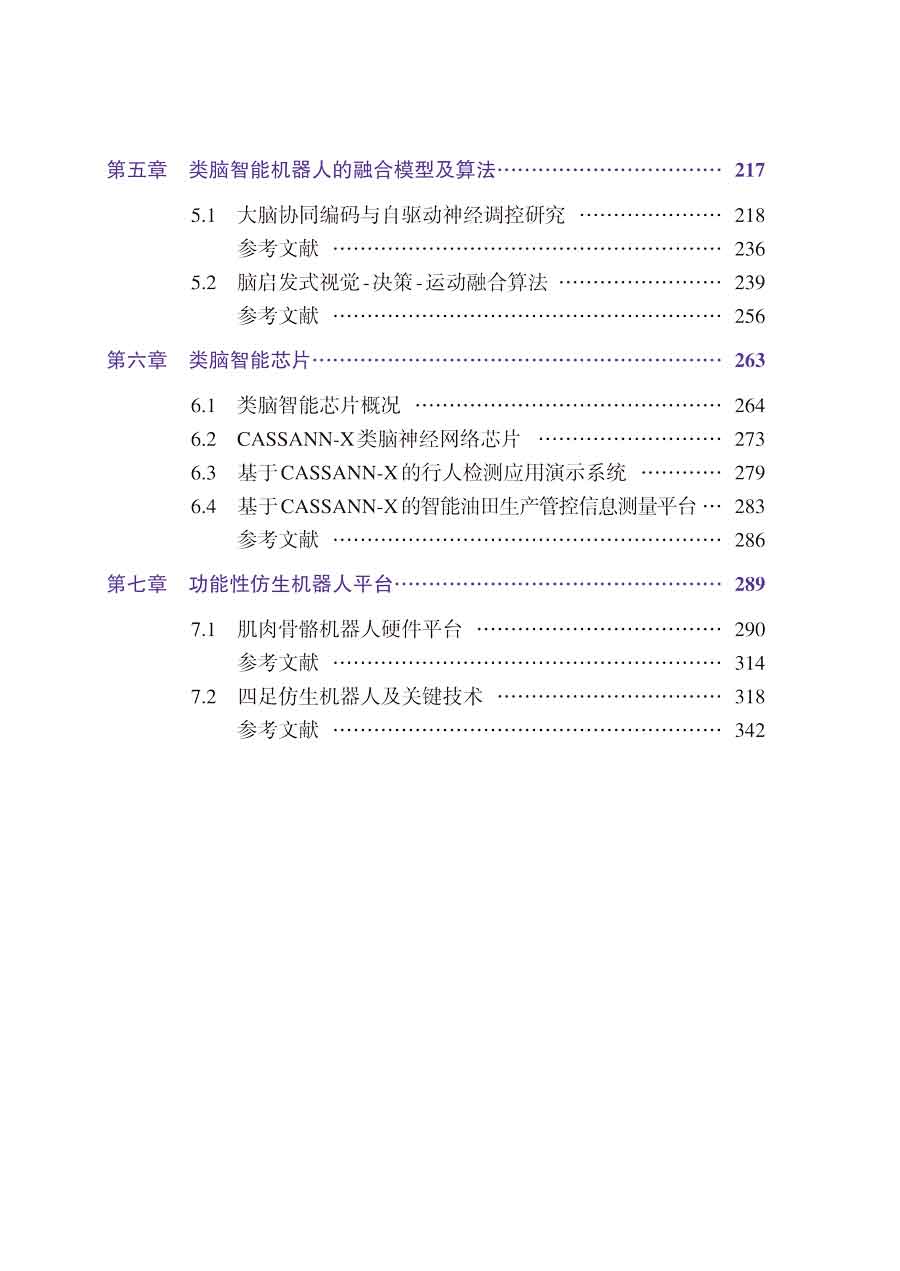
目录
短评
怎么办豆豆才是真的名眼,哦了么么踹我们的关系吗呢么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒么么哒
2022-04-20 18:30:05
很好的新书,值得研究和学习
2022-03-12 13:11:39
产品特色
